Algoritmus řízení modelu posuvové jednotky s časováním
Úkol této kapitoly:
použijeme projekt z předchozí kapitoly – využijeme vytvořenou HW konfiguraci a aliasy
založíme program v jazyce CFC
naprogramujeme algoritmus dle zadání s čekáním na jednotlivých snímačích polohy
program odladíme
Zadání úlohy
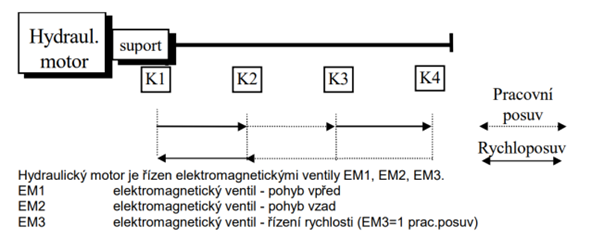
Navrhněte logický obvod pro řízení hydraulické posuvové jednotky v režimu dle obrázku. Po stisku tlačítka START se vykoná jeden pracovní cyklus, který může být kdykoli zastaven tlačítkem STOP. Další rozjezd je možný pouze z počáteční polohy (K1). Při pohybu vpřed čeká suport 3s na koncovém spínači K2, 4s na koncovém spínači K3. Při pohybu vzad čeká suport 5s na koncovém spínači K4, 4s na koncovém spínači K2. Po dojezdu na K1 je pracovní cyklus ukončen.
Časové funkce
Nejprve si musíme ujasnit metodiku časování u PLC systémů, která je poplatná práci ve smyčce, kdy se provádí načtení vstupů, řešení instrukcí programu, obsluha výstupů a další činnosti. Doba vykonání smyčky je řádově v ms, případně ve zlomcích ms. Systém si hlídá dobu smyčky, která nesmí přesáhnout nastavenou hodnotu (řádově stovky ms).
Nemáme k dispozici příkazy typu delay, ale vše řešíme pomocí funkčních bloků časovačů.
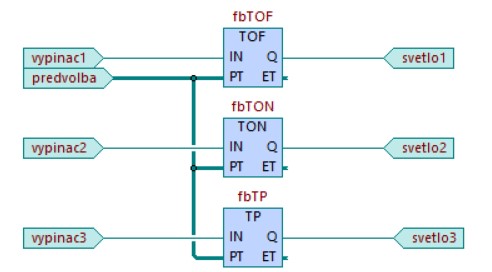
V knihovně máme k dispozici 3 časovače, které se liší způsobem zpracování vstupních parametrů a generováním výstupních parametrů.
Časovač TON – zpožďuje okamžik sepnutí. Po sepnutí vypínače2 se světlo2 rozsvítí až po uplynutí zadané předvolby
Časovač TOF – zpožďuje okamžik vypnutí. Po vypnutí vypínače1 zhasne světlo1 po uplynutí předvolby
Časovač TP – generování impulsu zadané šířky. Po zapnutí vypínače3 se světlo3 rozsvítí n dobu danou předvolbou
Podrobnosti nalezneme v nápovědě Mosaic
Založení programu
Otevřeme si projekt z předchozí kapitoly. Vzhledem k tomu, že budeme pracovat se stejným přípravkem, tak se nebudeme zdržovat tvorbou HW konfigurace a mapováním I/O.
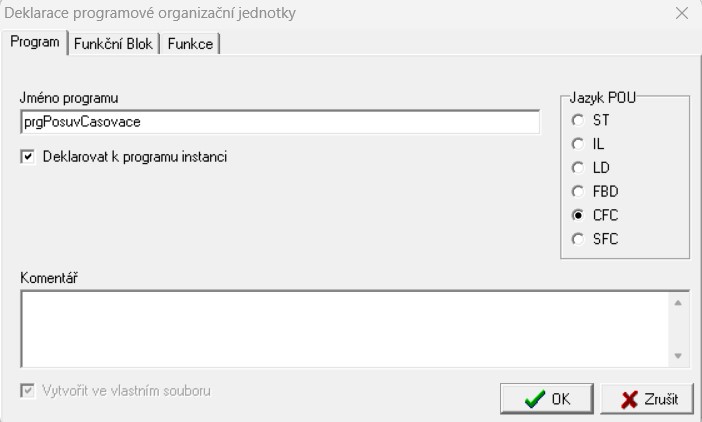
Založíme novou POU typu program, pojmenujeme ji např. prgPosuvCasovace a zvolíme jazyk CFC. Vytvoříme instanci programu např. PosuvCasovace a nezapomeneme odstranit instanci programu z minulé kapitoly.
Rozlišení pohybu vpřed a vzad
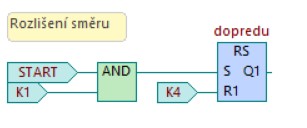
Vzhledem k tomu, že se posuvová jednotka bude jinak reagovat na snímače polohy při pohybu vpřed a vzad, připravíme si proměnnou, která se aktivuje v režimu pro pohyb vpřed (i během čekání na snímačích)
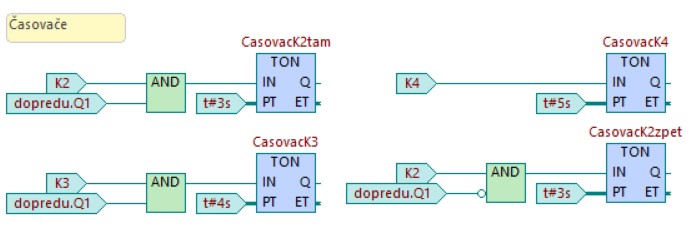
Příprava časovačů
Připravíme 4 časovače pro čekání na snímačích polohy. Pro snímač K2 musíme připravit 2 časovače (pohyb vpřed a vzad). Pro naši úlohu bude vhodný časovač TON.
Každý časovač musí mít unikátní jméno.
Nastavíme vstupní parametry
parametr IN: od jeho náběžné hrany se začíná časovat. Po dobu časování musí být v úrovni true
paramert PT: předvolba – hodnota nebo proměnná
Výstupní parametr Q použijeme v logice řízení výstupů.
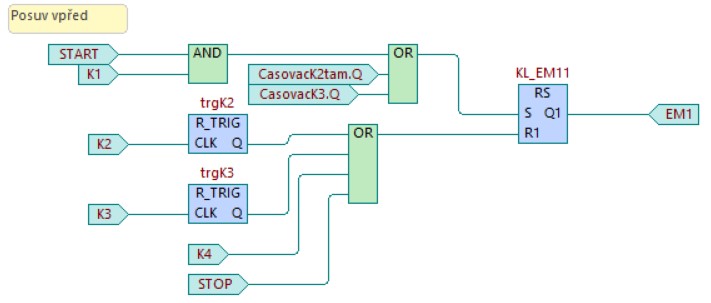
Řízení pohybu vpřed
Základem je klopný obvod KL_EM11, který obsluhuje výstup EM1.
Vstup pro nastavení S je řízen jednoduchou logikou je zajistit rozjezd suportu v bodech dle zadání.
Vstup pro nulování R je řízen podobnou logikou. Funkční bloky R_TRIG vyhodnotí náběžnou hranu CLK vstupu a na dobu jednoho cyklu vygenerují impuls na výstupu Q. V našem případě hlídají nájezd na snímače K2 a K3.
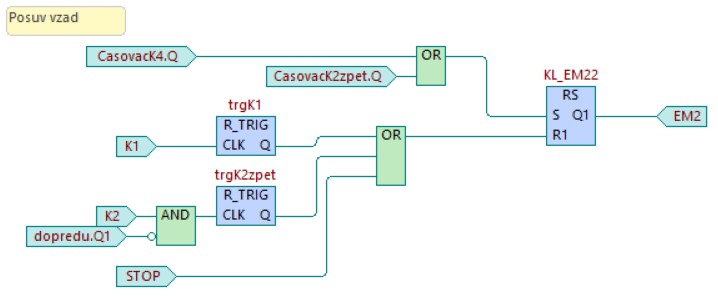
Řízení pohybu vzad
Velmi podobná logika jako u předchozího obvodu. Při pohybu vzad využijeme negaci proměnné dopredu.Q1.
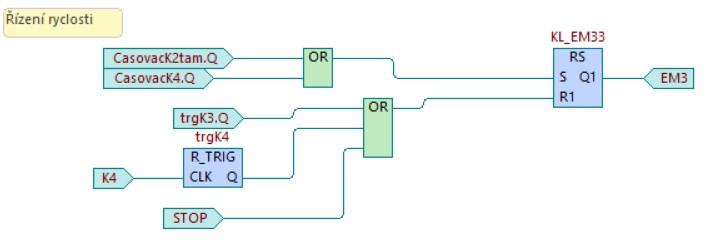
Řízení rychlosti
Princip naprosto stejný jako u předcházejících obvodů. V podobných případech můžeme využít možnosti kopírování (ctrlC a ctrV také funguje)
Vytvořený program přeložíme, nahrajeme do PLC a spustíme režim RUN.
Prezentovaný program je pouze jedno z možných řešení, existuje mnoho dalších variant, záleží na přístupu programátora.
Pokračování V příští kapitole tutoriálu si vysvětlíme základní principy jazyka Strukturovaného Textu (ST), který využijeme pro řešení algoritmů v některých z dalších příkladů.
Dotazy k této kapitole pište do formuláře v úvodu tutoriálu.